63. 不同路径II
题目描述:
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例 1:
输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右
示例 2:
输入:obstacleGrid = [[0,1],[0,0]]
输出:1
提示:
- m == obstacleGrid.length
- n == obstacleGrid[i].length
- 1 <= m, n <= 100
- obstacleGrid[i][j] 为 0 或 1
解题分析及思路:
此题为62、不同路径的进阶版本,与其唯一不同的是路上设置的路障。
对于机器人所在位置(i,j),因为此处可能会设有路障,那么机器人从到达此处有两种可能:
- 如果位置
(i,j)设有路障🚧,那么则表示无法到达该位置,此时路径条数为0; - 如果位置
(i,j)未设有路障,那么则表示可以到达该位置,此时路径条数为该位置左方位置与上方位置条数之和。
所以对应的状态转移方程为:
f(i,j)=f(i−1,j)+f(i,j−1) `(i,j)`未设有路障
f(i,j)=0 `(i,j)`设有路障🚧
那么对应动态规划解法:
-
定义状态: 在这个问题中,状态可以定义为到达每个位置时的不同路径数量。我们使用二维数组
dp表示状态,其中dp[i][j]表示到达网格位置(i, j)时的不同路径数量。 -
找到状态转移方程: 机器人每次只能向下或者向右移动一步,因此到达当前位置
(i, j)的不同路径数量等于到达上方位置(i-1, j)和到达左方位置(i, j-1)的路径数量之和。状态转移方程可以表示为:
dp[i][j] = dp[i-1][j] + dp[i][j-1] obstacleGrid[i][j] == 1
dp[i][j] = 0 obstacleGrid[i][j] == 0
-
初始化: 在初始化阶段,我们遍历第一行和第一列,将每个位置的路径数量初始化为1,因为机器人只能向下或向右移动,所以沿着第一行和第一列的路径数量都只有一种。并且在第一列某处设有路障之后,该列处于该处后续的位置均不可达,第一行也同理。
-
递推求解: 通过嵌套循环遍历整个二维数组,根据状态转移方程计算每个位置的不同路径数量。
-
计算最终结果: 最终结果即为到达右下角位置
(m-1, n-1)时的不同路径数量。
func uniquePathsWithObstacles(obstacleGrid [][]int) int {
m := len(obstacleGrid)
n := len(obstacleGrid[0])
dp := make([][]int, m)
for i := 0; i < m; i++ {
dp[i] = make([]int, n)
}
for i := 0; i < m; i++ {
if obstacleGrid[i][0] == 1 {
break
}
dp[i][0] = 1
}
for i := 0; i < n; i++ {
if obstacleGrid[0][i] == 1 {
break
}
dp[0][i] = 1
}
for i := 1; i < m; i++ {
for j := 1; j < n; j++ {
if obstacleGrid[i][j] == 0 {
dp[i][j] += dp[i-1][j] + dp[i][j-1]
}
}
}
return dp[m-1][n-1]
}
复杂度:
- 时间复杂度:O(M*N),其中 M 为 m 的值,N 为 n 的值。
- 空间复杂度:O(M*N),其中 M 为 m 的值,N 为 n 的值。
执行结果:
- 执行耗时:0 ms,击败了100.00% 的Go用户
- 内存消耗:2.3 MB,击败了75.28% 的Go用户
 ```
输入: preorder = [3,9,20,15,7], inorder = [
```
输入: preorder = [3,9,20,15,7], inorder = [ ```
输入:inorder = [9,3,15,20,7], postorder
```
输入:inorder = [9,3,15,20,7], postorder 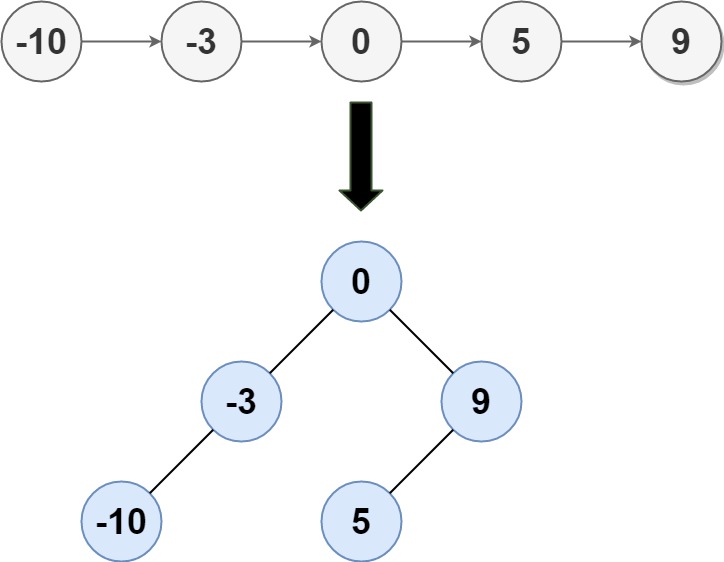 ```
输入: head = [-10,-3,0,5,9]
输出: [0,-3,9
```
输入: head = [-10,-3,0,5,9]
输出: [0,-3,9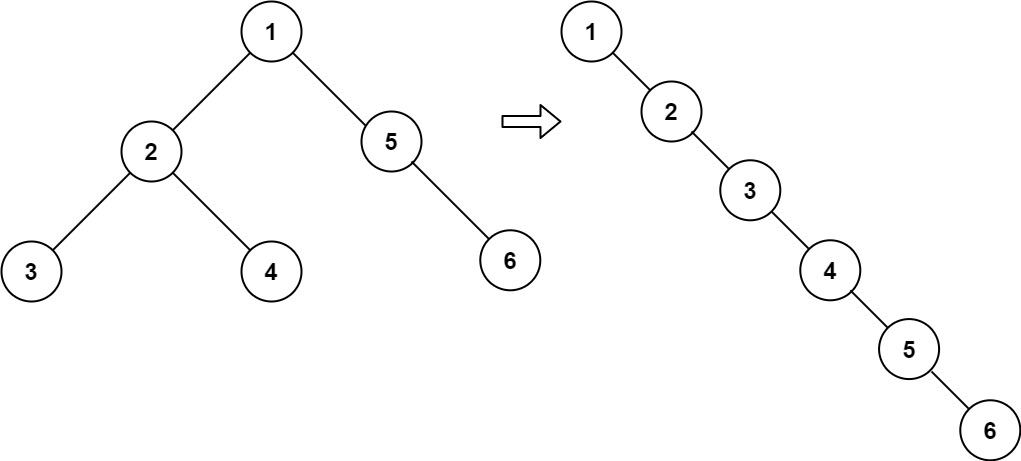 ```
输入:root
```
输入:root